Es geht weiter mit meinem Hexapod! (Intro)

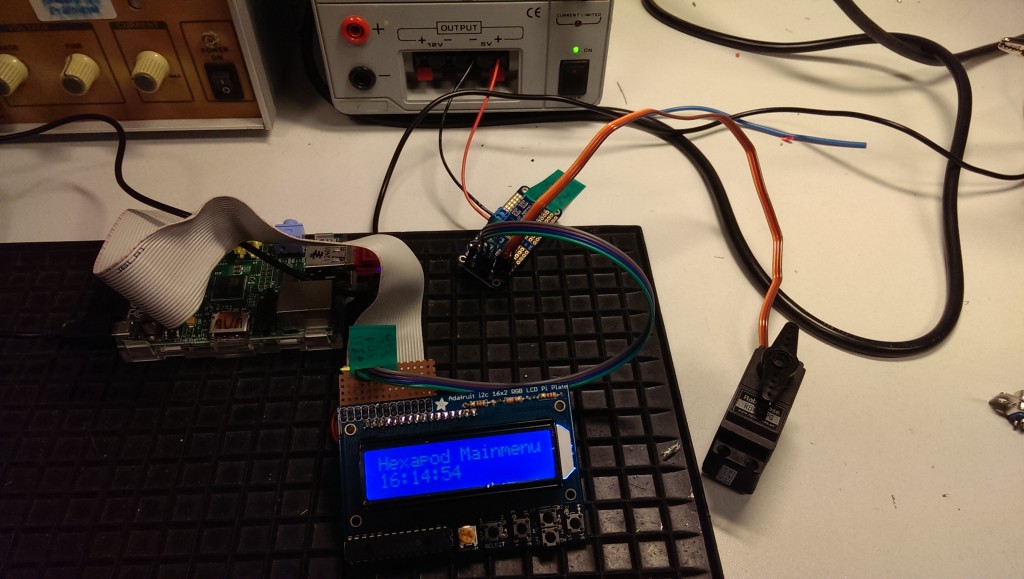
Testaufbau mit Raspberry Pi, Display, PWM Treiber und Servo
Das Gehirn
Wie schon im Intro erwähnt, wird das Gehirn des Roboters ein Raspberry Pi Rev.2. Der RasPi kommuniziert per USB-WLAN-Dongle mit der Welt und ist ansonsten out of the box. Die weitere Hardware wird per I2C angeschlossen. Als Betriebssystem läuft ein normales Raspbian ohne X-Server, weil ich sowieso nicht plane einen Monitor anzuschließen.
(mehr …)
Hallo Mithacker!
Wir haben diesen Blog auf unserer Seite und der soll auch gefüllt werden. Ich werde also hier versuchen die Fortschritte meines Hexapod-Projekts aufzuzeichnen.
Ziele des Projekts:
Zum Thema Hardware: Ich baue einen Laufroboter mit sechs Beinen, also einen Hexapod. Dabei werde ich gleich die große Lösung anpeilen und einen 3DOF Roboter bauen, dass heißt pro Bein wird er drei Gelenke aus Servomotoren haben. Der Körper wird vermutlich hauptsächlich aus unserem 3D-Drucker kommen.
(mehr …)